


میکرو سروو موتور دیجیتال SG90S پایه بلند 180 درجه
این سروو موتور کوچک با ولتاژ 3 تا 7.2 ولت کار می کند و با سیگنال PWM حرکت می کند
محدوده چرخش آن 180 درجه می باشد
توان آن 1.2 کیلوگرم تا 1.6 کیلو گرم می باشد
این موتور با وزن 9 گرم سرعت و دقت بالایی دارد
بدنه این سروو 2 میل بلند تر از نمونه پایه کوتاه آن است
پینهای موتور عبارتند از
1- قهوه ای به منفی
2- قرمز به مثبت
3- نارنجی به سیگنال
همراه با این موتور سه عدد پره و پیچهای اتصال نیز وجود دارد
کالاهای مرتبط





میکرو سروو موتور دیجیتال MG90S دنده فلزی 180 درجه
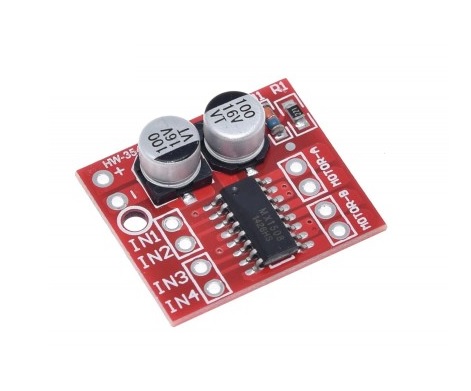
درایور موتور L298 برای دو موتور 5 تا 35 ولت 2 آمپر


ماژول BK1803 کنترول سرعت موتور 2 تا 15 ولت 2 آمپر

میکرو موتور مربعی 5 ولت 8000 دور


سروو تستر کوچک
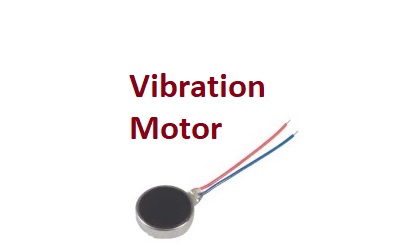
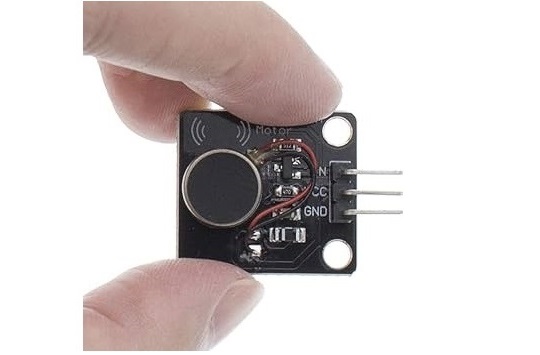
موتور ویبره 3 ولت سایز 10 در 3 میلیمتر

.jpg)

میکرو سروو موتور دیجیتال MG996R دنده فلزی 360 درجه

موتور و گیربکس دو طرفه کم سرعت

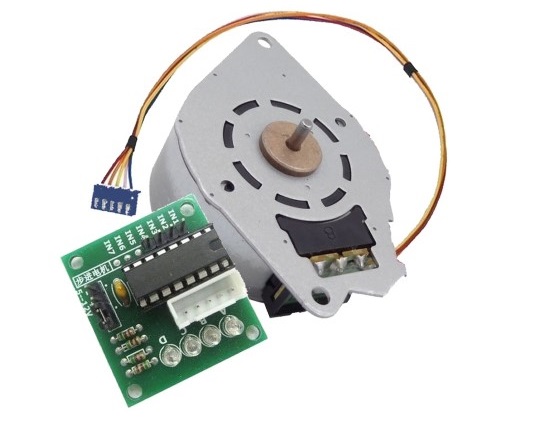
موتور و گیربکس زرد دو محوره ضریب کاهش 48 برابر


میکرو سروو موتور دیجیتال SG90S پایه کوتاه 180 درجه
- نظرکاربران
- مشخصات کالا
- توضیحات کاربردی
#include
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
سروو موتور ها
آشنایی
سروو موتور ها از دسته تجهیزات رباتیک هستند و برای انجام حرکتهای دقیق از آنها استفاده می شود
این موتورها از یک موتور کوچک و یک گیربکس و یک مدار کنترول آنالوگ یا دیجیتال تشکیل شده اند.
انواع دیجیتال دقیقتر و سریعتر و مصرف بیشتر دارند.
محدوده حرکت آنها در دو جهت از پیش تعیین می شود.
مثلا سروو های 180 درجه قادر هستند از صفر تا 180 درجه در دو جهت حرکت کنند.
همچنین اندازه زاویه گردش محور نیز قابل کنترول است و میتوان موتور را مثلا 6 درجه حرکت داد.
از این موتورها در بازو های رباتها بسیار استفاده می شود
روش کار
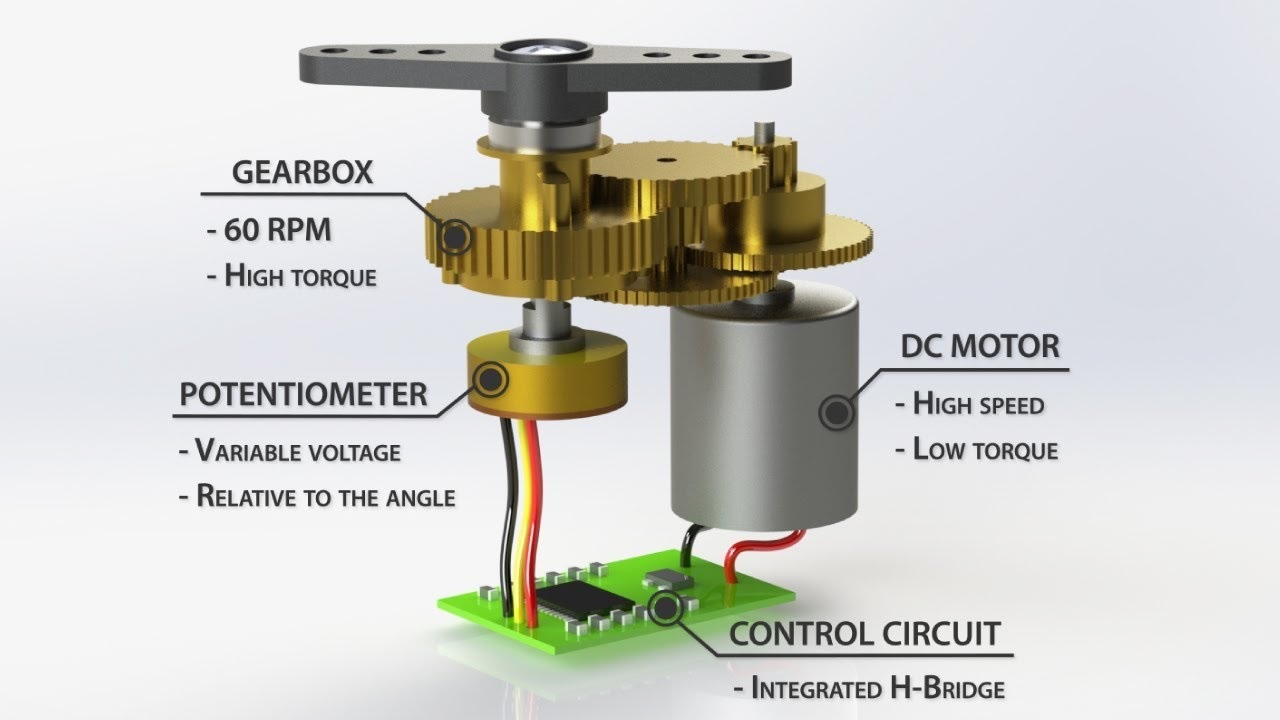
همان گونه که در شکل بالا میبینید
یک موتور که توسط بخش کنترولر راه اندازی می شود شروع به چرخش کرده و چرخ دنده ها را به حرکت در می آورد.
این چرخ دنده ها طوری طراحی شده اند که سرعت را کم و قدرت را زیاد کنند.
محور خروجی با قدرت زیاد و سرعت کم می گردد و کارهای محوله را انجام می دهد
از طرف یگر محور خروجی به یک پتانسیومتر متصل است که در حقیقت کار تشخیص زاویه و جهت چرخش را انجام می دهد.
این اطلاعات به سیستم کنترول منتقل شده و کنترولر در هر لحظه می داند که محور در چه وضعییتی قرار گرفته است.
به این شکل می توان اندازه زاویه چرخش را به شکل سیگنالهای PWM به موتور ارسال کرد تا موتور دقیقا به همان اندازه گردش کند
سروو موتورها با سه رشته سیم راه اندازی می شوند. دو رشته مربوط به مثبت و منفی تغذیه سیستم و یک رشته اطلاعات مربوط به مقدار حرکت را انتقال می دهد.
دقت کنید که سیمهای سروو موتور را نباید اشتباه متصل کنید زیرا احتمال خراب شدن سیستم کنترولر داخلی آن بسیار زیاد است
در ادامه جدول رنگهای سیمها را جهت تشخیص سیمهای موتور آورده ایم.

چگونگی راه اندازی
در ادامه قصد داریم یک سروو موتور را با کمک آردواینو ره اندازی کنیم
برای این کار نیاز به کتابخانه مخصوص سروو داریم که با کمک آن راه اندازی موتور بسیار آسان می شود
برای نصب کتابخانه به منوی tools/manage libraries بروید و کتابخانه Servo.h را پیدا کرده و نصب کنید
سپس مانند شکل زیر موتور را به میکرو کنترولر متصل کرده و برنامه نمونه را بار گزاری کنید
همانطور که می بینید سیم دیتای دیجیتال موتور را به پین دیجیتال 3 آردواینو متصل کرده ایم
این برنامه یک سرووی 180 درجه را در دو جهت حرکت می دهد.

مشخصات کالا
Voltage : 3 - 7.2 V
Power : 1.2 - 1.6 Kg
Size : 10 x 20 x 33 mm
Weight : 9 g