



سنسور KY-023 جوی استیک 5 جهته
این ماژول یک سنسور جوی استیک می باشد.
خروجی این ماژول در دو محور X و Y از نوع آنالوگ بوده و در محور Z به شکل دیجیتال است.
این جوی استیک به یک پتانسیومتر 10 کیلو اهمی راک PS2 مجهز است.
این ماژول می تواند در کنترل از راه دور ها و سایر کارهای تعاملی دیگر مورد استفاده قرار بگیرد.
همچنین این محصول به سادگی قابل اتصال به پروجکت برد می باشد و با انواع میکرو کنترولر ها قابلیت کار را دارد.
کالاهای مرتبط

سنسور آنالوگ جوی استیک 5 جهته مخصوص دسته بازی

ماژول KY-022 سنسور TL1838 گیرنده مادون قرمز

ماژول MH-MQ2 سنسور تشخیص گاز های قابل اشتعال و دود

سنسور MQ2 سنسور تشخیص گاز های قابل اشتعال و دود


مقاومت حرارتی NTC 10D-9 مقاومت 10 اهم 2 آمپر

سنسور لرزش و شیب یا سویچ جیوه ای

ماژول OV7670 دوربین VGA با لنز ثابت

ماژول KY-002 سنسور لرزش و ارتعاش

ماژول HC-SR04 سنجش فاصله اولتراسونیک

ماژول FC-22-MQ7 سنسور تشخیص گاز مونوکسید کربن
ماژول IR Obstacle سنسور مادون قرمز تشخیص مانع MH
ماژول FC-10 سنسور مادون قرمز تشخیص شعله
ماژول دیجیتال GY-291 شتابسنج جاذبه سه محوره


سنسور PIR-D203 حرکت مادون قرمز
ماژول MH-MQ5 سنسور تشخیص گاز متان و پروپان و بوتان

ماژول دیجیتال GY-521 شتابسنج و ژیروسکوپ سه محوره
ماژول CF-01 Reed switch کلید مغناتیس

ماؤول BME280 سنسور دیجیتال دما و رطوبت و فشار هوا


سنسور VS1838B گیرنده مادون قرمز 38KHZ

ماژول سنسور 38KHZ گیرنده مادون قرمز

- نظرکاربران
- مشخصات کالا
- توضیحات کاربردی
نمونه برنامه تست ماژول
Int JoyStick_X = 0; // x
Int JoyStick_Y = 1; // y
Int JoyStick_Z = 3; // key
Void setup () {
pinMode (JoyStick_X, INPUT);
PinMode (JoyStick_Y, INPUT);
PinMode (JoyStick_Z, INPUT);
Serial.begin (9600); // 9600 bps
}
void loop () {
int x, y, z;
x = analogRead (JoyStick_X);
y = analogRead (JoyStick_Y);
z = digitalRead (JoyStick_Z);
Serial.print (x, DEC); Serial.print ( ",");
Serial.print (y, DEC); Serial.print ( ",");
Serial.println (z, DEC);
}
جوی استیک 5 جهته
آشنایی
این جوی استیک یک پتانسیومتر 10 کیلو اهم است که در دو جهت X و Y حرکت می کند.
در این جوی استیک موقعیت کلاهک با تغییرات مقدار مقاومتی محور X و Y مشخص می شود.
در محور Z نیز یک کلید قرار دارد که با فشار دادن کلاهک وصل می شود.
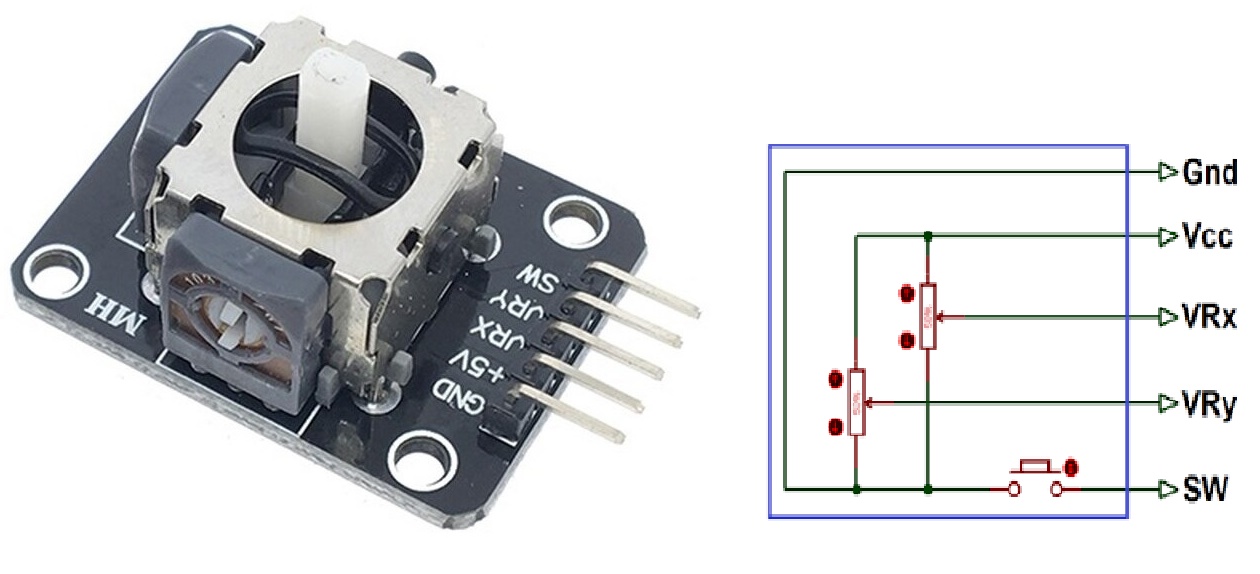
روش کار با ماژول
با توجه به شکل بالا مشاهده می کنید که عملکرد این جوی استیک بر مبنای تغییرات مقاومتی استوار است.
با اتصال پینهای تغذیه به یک منبع تغذیه 5 ولت خروجی های آنالوگ جوی استیک از صفر ولت تا 5 ولت تغییر می کند.
در حالتی که کلاهک در وسط قرار گیرد ولتاژ خروجی های آنالوگ 2/5 ولت است.
با پردازش این ولتاژ می توانید موقعیت محور آن را تشخیص دهید.
همچنین می توانید با اندازه گیری مقاومت پتانسیومتر ها اقدام به پردازش حرکت جوی استیک کنید.
محور جوی استیک طوری طراحی شده است که بعد از حرکت دادن آن و با رها کردن کلاهک به شکل خودکار به حالت وسط بر می گردد.
در شکل زیر میزان چرخش محور را مشاهده می کنید.
قسمت آبی رنگ بخش خلاص بوده و قسمتهای سبز رنگ محدوده قابل استفاده می باشد.

یک مثال ساده
مانند شکل زیر این ماژول را به یک آردواینو وصل کنید و برنامه تست را بارگزاری کنید.
در پنجره سریال می توانید نتیجه عملکرد جوی استیک را مشاهده کنید.
