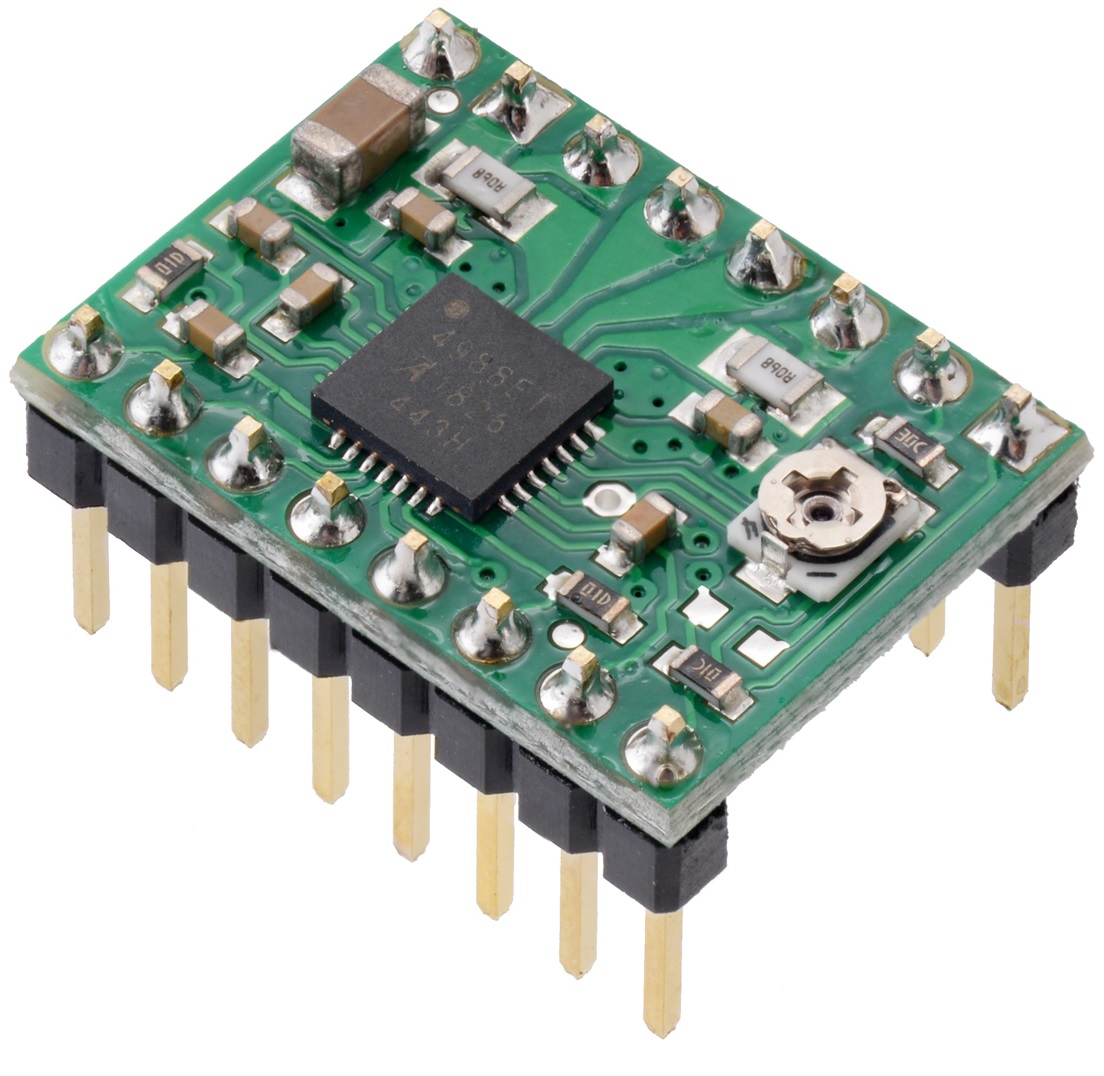
درایور A4988 استپر موتورهای 2 فاز 35 ولت 2 آمپر - سبز
درایور A4988 به کار رفته در این ماژول یک درایور قدرتمند میکرو استپ است که می تواند موتورهای استپر دو فاز
را در حالت استپ کامل و نیم استپ و ربع استپ و یک هشتم و یک شانزدهم استپ به حرکت در آورد.
توان این درایور با ولتاژ 35 ولت تا 2 آمپر می باشد که بسیاری از موتورها را شامل می شود.
سادگی ارتباط با میکرو کنترولر و امکاناتی مانند کنترول سرعت و جهت و میکرو استپ و امکان تنظیم حداکثر جریان موتور با پتانسیومتر است که به شما امکان می دهد که آنچه نیاز دارید را یک جا داشته باشید.
بنابراین می توانید از ولتاژهای بالاتر از ولتاژ نامی موتورهای پله ای خود برای دستیابی به توان بالاتر نیز استفاده کنید.
ویژگیهای درایور :
محافظت در برابر افزایش دما
محافظت در برابر افت ولتاژ
جریان متقاطع
محافظت در برابر اتصال کوتاه
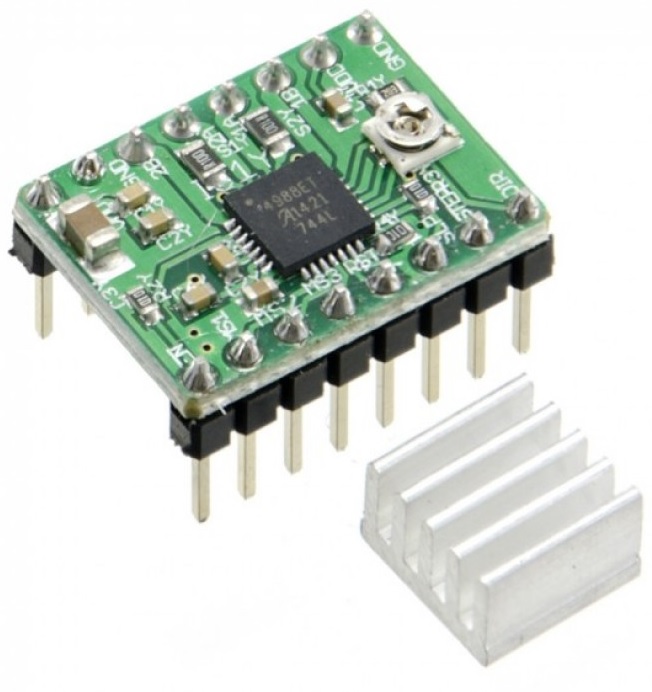
اندازه و سایز ماژول طوری طراحی شده است که امکان استفاده از آن را در شیلدهای CNC فراهم میسازد
کالاهای مرتبط

.jpg)

موتور و گیربکس دو طرفه سرعت بالا

میکرو سروو موتور دیجیتال SG90S پایه بلند 180 درجه


درایور موتور L298 برای دو موتور 5 تا 35 ولت 2 آمپر



ماژول BK1803 کنترول سرعت موتور 2 تا 15 ولت 2 آمپر


موتور و گیربکس دو طرفه کم سرعت
میکرو موتور مربعی 5 ولت 8000 دور

میکرو سروو موتور دیجیتال SG90S پایه کوتاه 180 درجه

موتور ویبره 3 ولت سایز 10 در 3 میلیمتر

سروو تستر کوچک

میکرو سروو موتور دیجیتال MG90S دنده فلزی 180 درجه
- نظرکاربران
- مشخصات کالا
- توضیحات کاربردی
نمونه برنامه تست ماژول
// Define stepper motor connections and steps per revolution:
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 1 revolution slowly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
// Spin the stepper motor 1 revolution quickly:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000);
// Set the spinning direction clockwise:
digitalWrite(dirPin, HIGH);
// Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
// Set the spinning direction counterclockwise:
digitalWrite(dirPin, LOW);
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < 5 * stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
delay(1000);
}
درایور A4988 راه انداز استپ موتورهای 2 فاز 8 تا 35 ولت 2 آمپر
آشنایی با ماژول
در خیلی جاها به دلیل عدم سازگاری خروجی پردازنده ها با مشخصات موتور نمیشود مستقیما آن را به موتور متصل کرد و نیاز به درایور داریم.
این درایور به دلیل ویژگیهای خوب و قیمت پایینی که دارد بسیار مورد توجه قرار گرفته است و در بسیاری از پروژه ها حضور دارد.
اندازه و شکل آن با برد برد و شیلدهای مخصوص ماشینهای CNC و پرینترهای سه بعدی کاملا سازگار می باشد.
توان راه اندازی موتور های دو فاز با ولتاژ 8 تا 35 ولت با جریان 2 آمپر در هر فاز امکان استفاده از این ماژول را برای طیف وسیعی از موتورها فراهم می کند.
روش کار با ماژول
در اینجا به چگونگی استفاده از این درایور می پردازیم
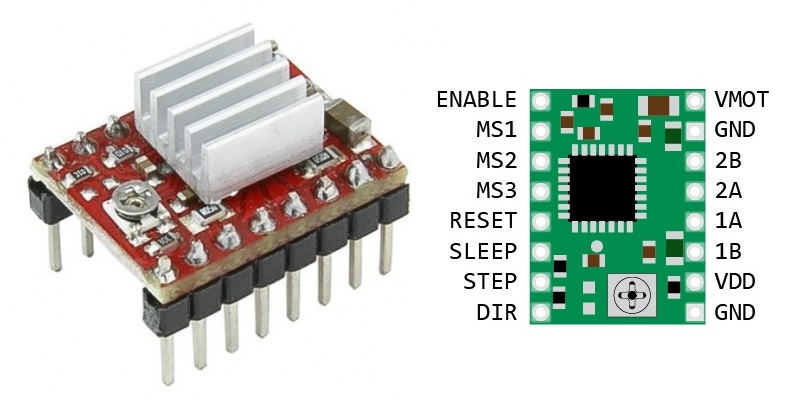
پینهای ماژول به شرح زیر می باشد
تغذیه موتور VMO 8-35V
منفی موتور GND Motor ground
SLP و RST اگر 5 ولت باشد موتور فعال است و اگر صفر باشد موتور حرکت نمیکند. این پین بیشتر برای آنکه وقتی موتور حرکت ندارد مصرف انرژی کاهش یابد استفاده می شود
ولتاز تغذیه درایور VDD 5V
منفی درایور GND Logic ground
فرمان حرکت STP Pin 3
فرمان جهت حرکت DIR Pin 2
به فازهای موتور متصل می شوند. 1A, 1B, 2A, 2B Stepper motor
پینهای A1 و B1 به یک فاز و A2 و B2 به فاز دیگر متصل میشوند. اتصال فازها پلاریته ندارند.
اگر جهت چرخش موتور بر خلاف انتظار شما بود کافیست جای پینهای A1 و B1 را با هم عوض کنید.
پینهای MS1 تا MS3 برای تعیین وضعیت هر استپ می باشد.
MS1=Low , MS2=Low , MS3=Low - Full step
MS1=High , MS2=Low , MS3=Low - 1/2 step
MS1=Low , MS2=High , MS3=Low - 1/4 step
MS1=High , MS2=High , MS3=Low - 1/8 step
MS1=High , MS2=High , MS3=High - 1/16 step
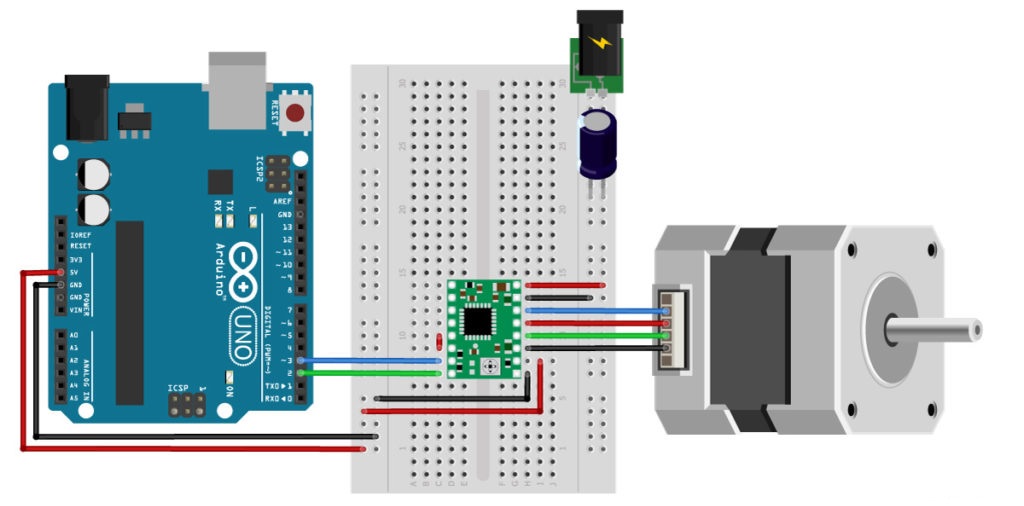
یک مثال ساده
حالا همانند شکل زیر اتصالات موتور را و درایور را انجام دهید و برنامه نمونه را بارگزاری کنید. این برنامه موتور را در دو جهت حرکن می دهد